CC-CV Charging (Proportional Control)
Constant-current constant-voltage charging algorithm with proportional control
Since R2025a
Libraries:
Simscape /
Battery /
BMS /
Current Management
Description
The CC-CV Charging (Proportional Control) block implements a constant-current (CC), constant-voltage (CV) charging algorithm for a battery with proportional control. To implement the CC-CV charging algorithm with proportional-integral control, see the Battery CC-CV block.
This block supports single-precision and double-precision floating-point simulation.
Note
To enable inherited single-precision floating-point simulation, the data type of all
inputs and parameters, except for the Sample time (-1 for
inherited) parameter, must be single.
To configure the block for discrete time, set the Sample time (-1
for inherited) parameter to a positive, nonzero value. To inherit the sample time
from an upstream block, set the Sample time (-1 for
inherited) parameter to -1.
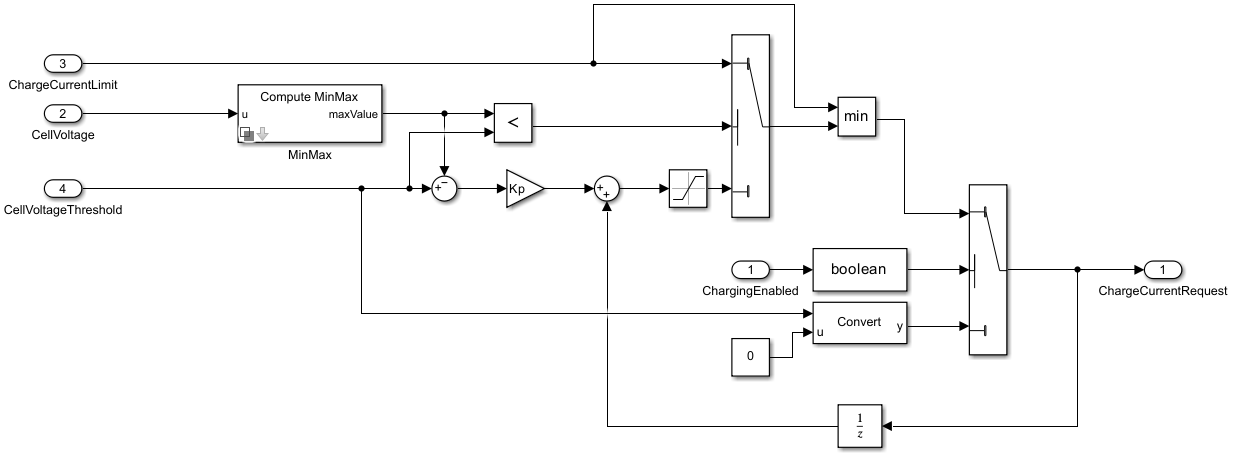
This diagram illustrates the overall structure of the block:
Equations
This block implements the CC-CV algorithm in constant-current and constant-voltage modes. This figure shows the operation of these modes:

This equation defines the battery charging current that the block outputs at the discrete-time instant k:
where
ichg(k) is the charging current at time instant k.
ichg(k-1) is the charging current at the previous time instant.
vmax is the voltage of the highest cell.
vthreshold is the maximum allowable cell voltage.
Kp is the value of the Controller proportional gain parameter.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2025a