Harmonic Drive
High-ratio speed reducer based on elastic deformation of an elliptical gear

Libraries:
Simscape /
Driveline /
Gears
Description
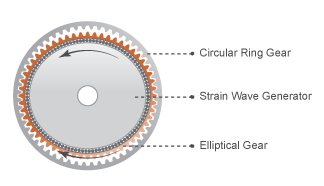
The Harmonic Drive block represents a compact, high-ratio speed reduction mechanism that contains three key components:
Strain wave generator
Elliptical gear
Circular ring gear
A harmonic drive is backlash-free with a high-ratio of speed reduction by design. This is advantageous for systems that require precise gear positioning. The base shaft turns the strain wave generator, which is elliptical with bearings around the circumference. The bearings allow the strain wave generator to rotate within the elliptical gear. The elliptical gear is flexible, and the motion of the strain wave generator causes the vertices of the elliptical gear to move. This deformation of the ellipse causes the teeth of the elliptical gear to slowly climb the teeth of the circular ring gear. The ring gear has more teeth than the elliptical gear to allow for this motion. The elliptical gear transmits torque to the output shaft while rotating within the ring gear.
Meshing occurs concurrently at both vertices of the elliptical gear. This design doubles the teeth in mesh, thereby increasing the torque capacity of the drive system.
The internal meshing between the two gears causes the elliptical gear axis to spin counter to the elliptical strain wave generator.
Large reduction ratios arise from the near-equal gear tooth numbers. The effective gear reduction ratio is
where:
r is the gear reduction ratio.
nC is the number of teeth on the circular ring gear.
nE is the number of teeth on the elliptical gear.
The Simple Gear block provides the foundation for this block.
Ring Gear Rotation
You can enable rotation of the circular ring gear by selecting the Ring gear rotation parameter. The block enables port R, which allows you to control the rotational motion of the ring gear by using a mechanical rotational input signal.
Note
The Ring gear rotation parameter determines how you parameterize meshing losses.
When you clear Ring gear rotation, the block calculates the efficiencies using the Simple Gear block implementation. In this case, you parameterize the meshing losses the same way you would for the Simple Gear block. When you select Ring gear rotation, the block calculates the efficiencies by implementing the Planetary Gear block. For this case, you parameterize the meshing losses the same way you would for the Planetary Gear block.
Thermal Model
You can model
the effects of heat flow and temperature change by enabling the optional thermal port. To enable
the port, set Friction model to Temperature-dependent
efficiency.
Variables
Use the Variables settings to set the priority and initial target values for the block variables before simulating. For more information, see Set Priority and Initial Target for Block Variables.