Gear Applications
Gears transmit torque when meshed with other gears. These examples demonstrate various gear implementations.
Featured Examples
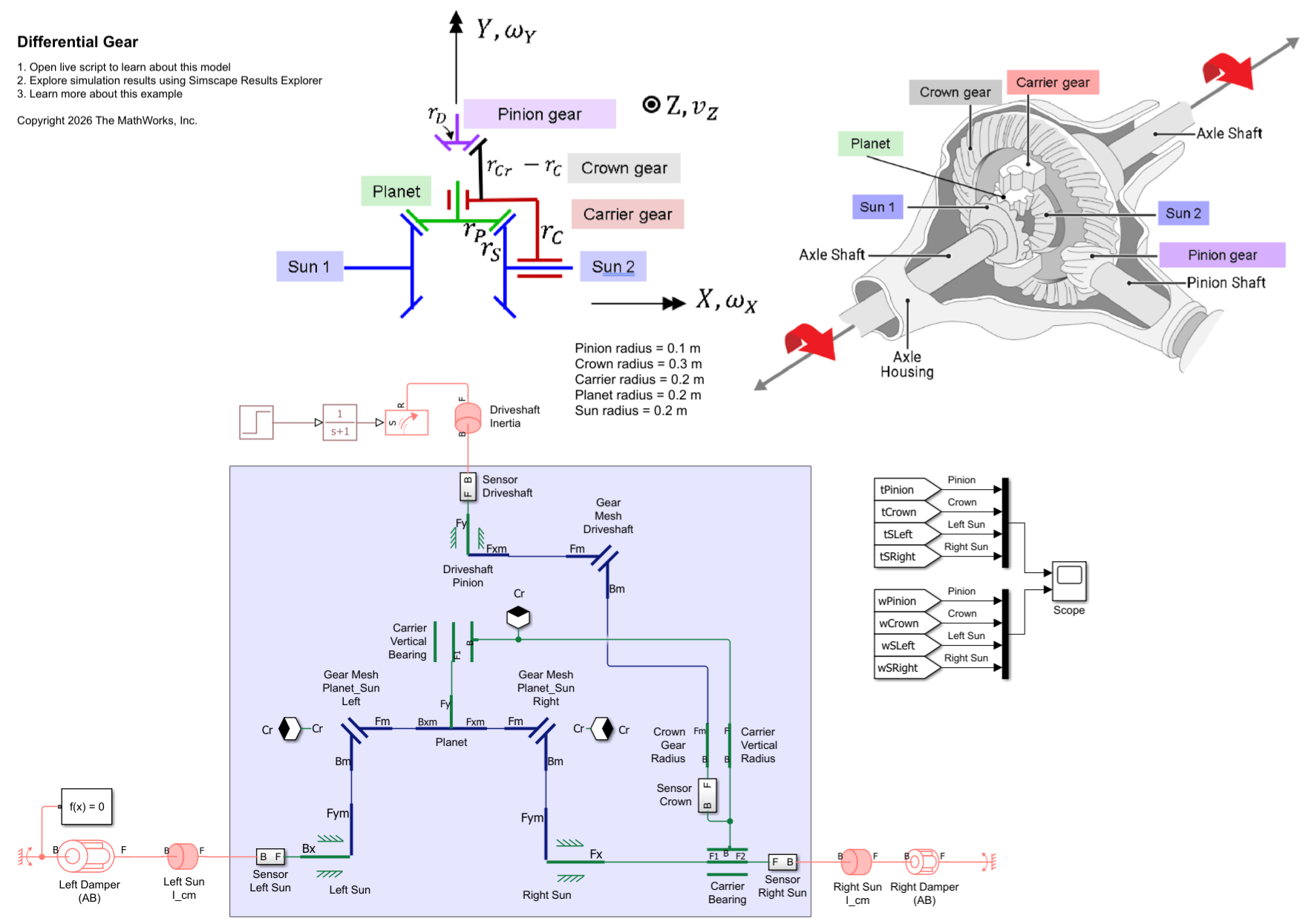
Custom Gear Library
Use the custom Simscape™ Gear Library to build and analyze different gear‑train configurations, ranging from a simple gear pair to planetary and differential systems. The library provides a graphical, component‑level way to model gear mechanisms so that your Simscape diagram closely resembles a traditional gear stick diagram. The gear stick diagram is a side‑view representation where gear axes lie in the plane of the Simulink® canvas.

Custom Planetary Gear
Illustrates how you can build your own custom planetary gear components from the Simscape™ Driveline™ Planetary Subcomponents library. The example is based on Example 10.7 published in K.J. Waldron, G.L. Kinzel "Kinematics, Dynamics, and Design of Machinery", 1999. It consists of a coupled planetary train built from simple and compound planetary trains with a common carrier and bevel gears. The simple train fundamental train ratio is -N_4/N_2 * N_7/N_4 = -N_7/N_2. It connects shafts S2 and S7. The compound planetary train fundamental ratio is -N_4/N_2 * N_6/N_5 and it connects shafts S2 and S6. When the input shaft of the train is rotated at 100 rpm, the model shows the output shaft rotates at 1.4456 rpm as given in the reference.
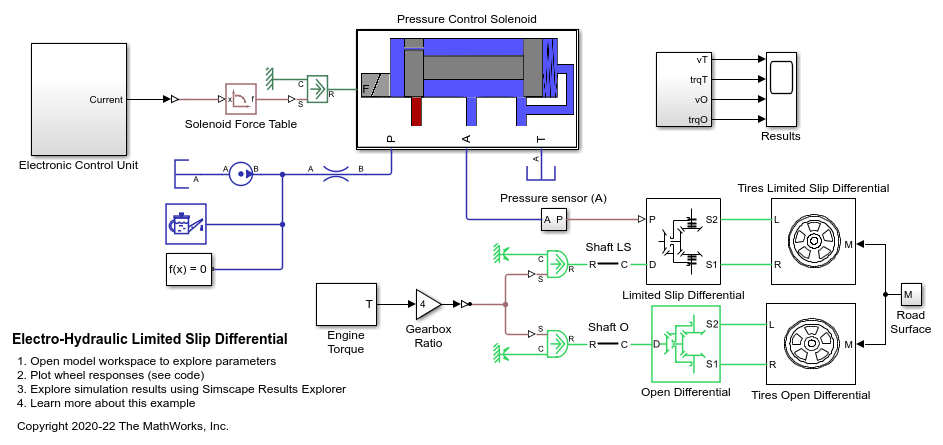
Electro-Hydraulic Limited Slip Differential
A simple way of modeling an electro-hydraulic limited slip differential system. The model shows the velocity and the torque profile responses achieved for the left and the right wheels.

Epicyclic Gear Efficiency Measurement
An epicyclic gear drive with overall ratio of 256:1 and verifies its transmission efficiency given the individual gear meshing efficiencies. The example is based on Tuplin, W.A. "Designing Compound Epicyclic Gear Trains for Maximum Speed at High Velocity Ratios", Machine Design, April 4, 1957. The drive is built of two ring-planet elements as shown in the gearbox schematic. The example confirms the transmission efficiency value of 0.22 as predicted by the analytical analysis presented in the paper.
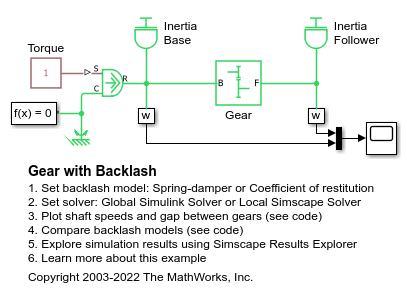
Gear with Backlash
Model a gear with backlash using the Simple Gear block with two different backlash models: a spring-damper model and a coefficient of restitution model. The backlash is set to 1 mm, which is equivalent to 0.032 degrees rotation of the input gear that has a radius of 100 mm or 0.016 degrees rotation of the output gear that has a radius of 200 mm. Parameters in the two backlash models are adjusted so that there are a few oscillations when the torque is applied, and the models have similar behavior.
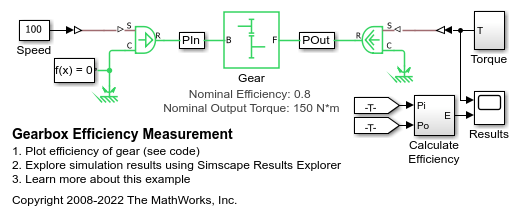
Gearbox Efficiency Measurement
A test for measuring gear box efficiency. The input shaft is driven at a fixed speed and a variable torque is applied to the output shaft. Power is measured on both the input and output shafts, and efficiency is calculated as the ratio of output to input power. The simulation results match the parameters specified for the efficiency of the gear.
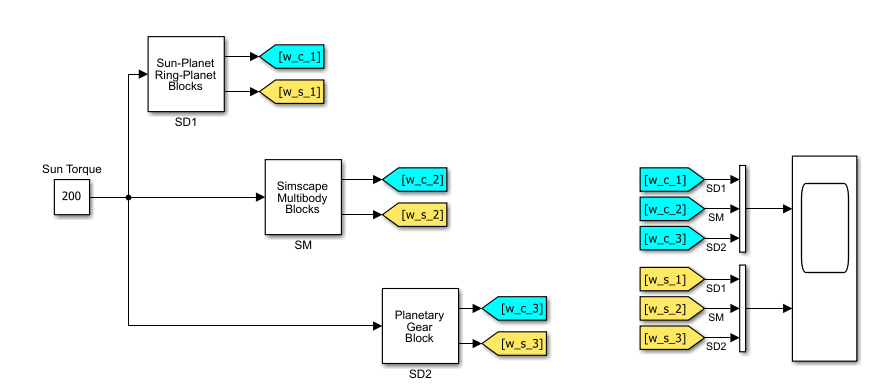
Planetary Gear Comparison
Compares three physically identical implementations of a planetary gearbox with a moving sun, planets and carrier, and a fixed outer ring.

Simple Gear
A simple gear coupling two inertias (shafts). The gear ratio between the follower (F) and base (B) is 2:1. Thus the angular velocity of the follower shaft is half the angular velocity of the base shaft. The follower shaft torque is twice the base shaft torque.

Variable Ratio Gear
A variable ratio gear coupling two inertias (shafts). The gear ratio between the follower (F) and the base (B) is steadily increased from 1:1 to 2:1. The ratio of the follower to base angular speed decreases with gear ratio, and conversely the ratio of the follower to base torque increases with gear ratio. The variable gear is implemented using the Variable Ratio Transmission block which includes compliance. Appropriate stiffness and damping values for the compliance will depend upon the levels of torque transmitted by the variable gear. If the compliance damping is unrealistically low, the system can develop high frequency oscillations that require small simulation time steps.