Exchange Data with ROS Publishers and Subscribers
This example shows how to publish and subscribe to topics in a ROS network.
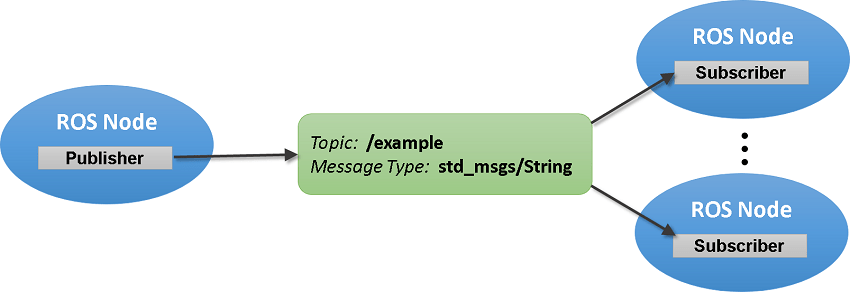
The primary mechanism for ROS nodes to exchange data is sending and receiving messages. Messages are transmitted on a topic, and each topic has a unique name in the ROS network. If a node wants to share information, it uses a publisher to send data to a topic. A node that wants to receive that information uses a subscriber to that same topic. Besides its unique name, each topic also has a message type, which determines the types of messages that are capable of being transmitted under that topic.
This publisher and subscriber communication has the following characteristics:
Topics are used for many-to-many communication. Many publishers can send messages to the same topic and many subscribers can receive them.
Publishers and subscribers are decoupled through topics and can be created and destroyed in any order. A message can be published to a topic even if there are no active subscribers.
The concept of topics, publishers, and subscribers is illustrated in this figure.
Besides how to publish and subscribe to topics in a ROS network, this example also shows how to:
Wait until a new message is received
Use callbacks to process new messages in the background
Subscribe and Wait for Messages
Start the ROS master in MATLAB® using the rosinit command.
rosinit
Launching ROS Core... ...Done in 3.6961 seconds. Initializing ROS master on http://172.19.136.75:56426. Initializing global node /matlab_global_node_67357 with NodeURI http://vdi-wd1bgl-223:60706/ and MasterURI http://localhost:56426.
Create a sample ROS network with several publishers and subscribers using the provided helper function exampleHelperROSCreateSampleNetwork.
exampleHelperROSCreateSampleNetwork
Use rostopic list to see which topics are available.
rostopic list/pose /rosout /scan /tf
Use rostopic info to check if any nodes are publishing to the /scan topic. The command below shows that node_3 is publishing to it.
rostopic info /scan
Type: sensor_msgs/LaserScan Publishers: * /node_3 (http://vdi-wd1bgl-223:60722/) Subscribers: * /node_1 (http://vdi-wd1bgl-223:60711/) * /node_2 (http://vdi-wd1bgl-223:60717/)
Use rossubscriber to subscribe to the /scan topic. If the topic already exists in the ROS network (as is the case here), rossubscriber detects its message type automatically, so you do not need to specify it. Use messages in struct format for better efficiency.
laser = rossubscriber("/scan","DataFormat","struct"); pause(2)
Use receive to wait for a new message. (The second argument is a time-out in seconds.) The output scandata contains the received message data.
scandata = receive(laser,10)
scandata = struct with fields:
MessageType: 'sensor_msgs/LaserScan'
Header: [1×1 struct]
AngleMin: -0.5467
AngleMax: 0.5467
AngleIncrement: 0.0017
TimeIncrement: 0
ScanTime: 0.0330
RangeMin: 0.4500
RangeMax: 10
Ranges: [640×1 single]
Intensities: []
Some message types have visualizers associated with them. For the LaserScan message, rosPlot plots the scan data. The MaximumRange name-value pair specifies the maximum plot range.
figure
rosPlot(scandata,"MaximumRange",7)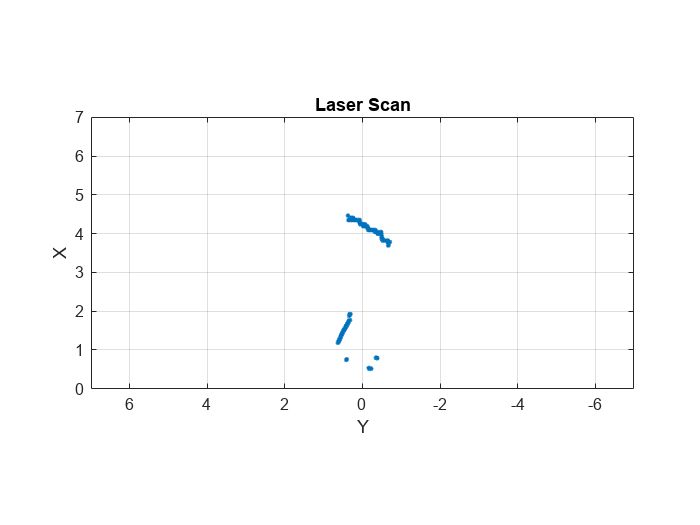
Subscribe Using Callback Functions
Instead of using receive to get data, you can specify a function to be called when a new message is received. This allows other MATLAB code to execute while the subscriber is waiting for new messages. Callbacks are essential if you want to use multiple subscribers.
Subscribe to the /pose topic, using the callback function exampleHelperROSPoseCallback.
robotpose = rossubscriber("/pose",@exampleHelperROSPoseCallback,"DataFormat","struct")
robotpose =
Subscriber with properties:
TopicName: '/pose'
LatestMessage: []
MessageType: 'geometry_msgs/Twist'
BufferSize: 1
MessagePreprocessingEnabled: 0
NewMessageFcn: @exampleHelperROSPoseCallback
DataFormat: 'struct'
One way of sharing data between your main workspace and the callback function is to use global variables. Define two global variables pos and orient.
global pos global orient
The global variables pos and orient are assigned in the exampleHelperROSPoseCallback function when new message data is received on the /pose topic.
Wait for a few seconds to make sure that the subscriber can receive messages. The most current position and orientation data will always be stored in the pos and orient variables.
pause(2) pos
pos = 1×3
0.0429 0.0230 -0.0011
orient
orient = 1×3
0.0079 -0.0263 -0.0041
If you type in pos and orient a few times in the command line, you can see that the values are continuously updated.
Stop the pose subscriber by clearing the subscriber variable.
clear robotposeNote: There are other ways to extract information from callback functions besides using globals. For example, you can pass a handle object as additional argument to the callback function. See the Create Callbacks for Graphics Objects documentation for more information about defining callback functions.
Publish Messages
Create a publisher that sends ROS string messages to the /chatter topic (see Work with Basic ROS Messages).
chatterpub = rospublisher("/chatter","std_msgs/String","DataFormat","struct")
chatterpub =
Publisher with properties:
TopicName: '/chatter'
NumSubscribers: 0
IsLatching: 1
MessageType: 'std_msgs/String'
DataFormat: 'struct'
pause(2) % Wait to ensure publisher is registeredCreate and populate a ROS message to send to the /chatter topic.
chattermsg = rosmessage(chatterpub);
chattermsg.Data = 'hello world'chattermsg = struct with fields:
MessageType: 'std_msgs/String'
Data: 'hello world'
Use rostopic list to verify that the /chatter topic is available in the ROS network.
rostopic list/chatter /pose /rosout /scan /tf
Define a subscriber for the /chatter topic. exampleHelperROSChatterCallback is called when a new message is received and displays the string content in the message.
chattersub = rossubscriber("/chatter",@exampleHelperROSChatterCallback,"DataFormat","struct")
chattersub =
Subscriber with properties:
TopicName: '/chatter'
LatestMessage: []
MessageType: 'std_msgs/String'
BufferSize: 1
MessagePreprocessingEnabled: 0
NewMessageFcn: @exampleHelperROSChatterCallback
DataFormat: 'struct'
Publish a message to the /chatter topic. The string is displayed by the subscriber callback.
send(chatterpub,chattermsg) pause(2)
ans = 'hello world'
The exampleHelperROSChatterCallback function was called as soon as you published the string message.
Shut Down ROS Network
Remove the sample nodes, publishers, and subscribers from the ROS network. Clear the global variables pos and orient.
exampleHelperROSShutDownSampleNetwork clear global pos orient
Shut down the ROS master and delete the global node.
rosshutdown;