Use Distributed Arrays to Solve Systems of Linear Equations with Direct Methods
This example shows how to solve a system of linear equations of the form in parallel with a direct method using distributed arrays.
Distributed arrays are well-suited for large mathematical computations, such as large problems of linear algebra. In the same way as for arrays stored in the client memory, you can use mldivide to solve can systems of linear equations defined using distributed arrays, so you do not need to change your code.
Distributed arrays distribute data from your client workspace to a parallel pool in your local machine or in a cluster. Each worker stores a portion of the array in its memory, but can also communicate with the other workers to access all segments of the array. Distributed arrays can contain different types of data including full and sparse matrices.
Direct methods of solving linear equations typically factorize the coefficient matrix to compute the solution. mldivide selects one of a set of direct solver methods depending on the structure of and whether is full or sparse.
This example demonstrates how to solve a simple system of linear equations of the form with an exact, known solution . The system is defined by the matrix and the column vector . The solution is also a column vector. In this example, the system is defined using full and sparse matrices. The required code is the same for systems defined using distributed arrays or arrays on the client memory.
For a related example that shows how to use iterative solvers and distributed arrays, see Use Distributed Arrays to Solve Systems of Linear Equations with Iterative Methods.
Solve a Full Matrix System
First define the coefficient matrix as variable in the client memory, A, and then pass this matrix to the distributed function to create a distributed version of the same matrix, ADist. When you use the distributed function, MATLAB automatically starts a parallel pool using your default cluster settings.
n = 1e3; A = randi(100,n,n); ADist = distributed(A);
You can now define the right hand vector . In this example, is defined as the row sum of , which leads to an exact solution to of the form .
b = sum(A,2); bDist = sum(ADist,2);
Since sum acts on a distributed array, bDist is also distributed and its data is stored in the memory of the workers of your parallel pool. Finally, define the exact solutions for comparison with the solutions obtained using direct numerical methods.
xEx = ones(n,1);
xDistEx = ones(n,1,"distributed");Now that you have defined your system of linear equations, you can use mldivide to solve the system directly. In MATLAB, you can call mldivide using the special operator \. You do not have to change your code to solve the distributed system as mldivide has automatic support for distributed arrays.
Once you have calculated the solution, you can check the error between each element of the obtained result and the expected values of .
x = A\b; err = abs(xEx-x); xDist = ADist\bDist; errDist = abs(xDistEx-xDist); figure subplot(2,1,1) semilogy(err,"o"); title("System of Linear Equations with Full Matrices"); ylabel("Absolute Error"); xlabel("Element in x"); ylim([10e-17,10e-13]) subplot(2,1,2) semilogy(errDist,"o"); title("System of Linear Equations with Distributed Full Matrices"); ylabel("Absolute Error"); xlabel("Element in x"); ylim([10e-17,10e-13])
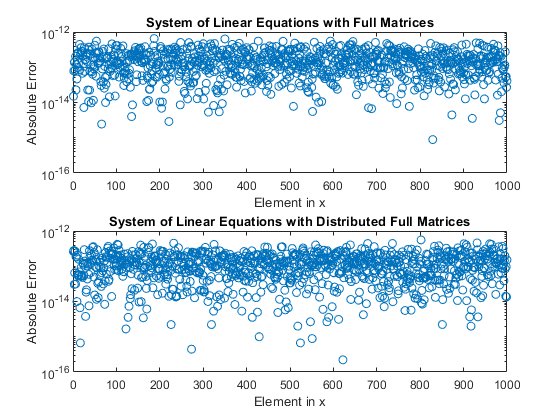
For both the distributed arrays and the arrays stored on the client, the absolute error between the calculated results for and the exact result is small. The accuracy of the solution is approximately the same for both array types.
mean(err)
ans = 1.6031e-13
mean(errDist)
ans = 1.2426e-13
Solve a Sparse Matrix System
Distributed arrays can also contain sparse data. To create the coefficient matrix , use sprand and speye to directly generate a sparse matrix of random numbers plus the sparse identity matrix. Adding the identity matrix helps to prevent creating as a singular or near-singular matrix, both of which are difficult to factorize.
n = 1e3; density = 0.2; A = sprand(n,n,density) + speye(n); ADist = distributed(A);
Choosing the right hand vector as the row sum of yields an exact solution of the same form as the solution to the full matrix system.
b = sum(A,2);
bDist = sum(ADist,2);
xEx = ones(n,1);
xDistEx = ones(n,1,"distributed");In the same way as with full matrices, you can now solve this system of linear equations directly using mldivide and check the error between the obtained result and its expected value.
x = A\b; err = abs(xEx-x); xDist = ADist\bDist; errDist = abs(xDistEx-xDist); figure subplot(2,1,1) semilogy(err,"o"); title("System of Linear Equations with In-Client Sparse Matrices"); ylabel("Absolute Error"); xlabel("Element in x"); ylim([10e-17,10e-13]) subplot(2,1,2) semilogy(errDist,"o"); title("System of Linear Equations with Distributed Sparse Matrices"); ylabel("Absolute Error"); xlabel("Element in x"); ylim([10e-17,10e-13])
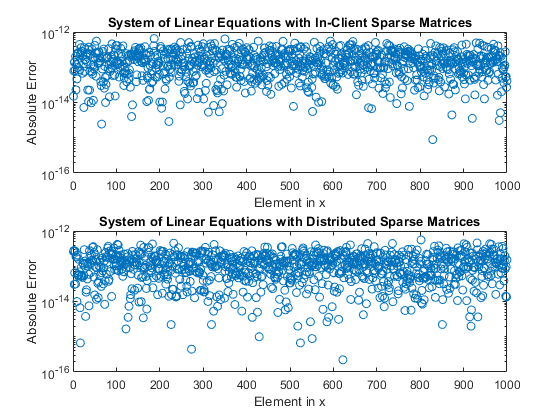
As with the full matrix system, solving the system of linear equations using both on-client arrays and distributed arrays produces solutions with comparable accuracy.
mean(err)
ans = 1.6031e-13
mean(errDist)
ans = 1.2426e-13
After you are done with your computations, you can delete your parallel pool. The gcp function returns the current parallel pool object so you can delete the current pool.
delete(gcp("nocreate"));Improving Efficiency of the Solution
For certain types of large and sparse coefficient matrix , there are more efficient methods than direct factorization for solving your systems. In these cases, iterative methods might be more efficient at solving your system of linear equations. Iterative methods generate a series of approximate solutions that converge to a final result. For an example of how to use iterative methods to solve linear equations with large, sparse input matrices, see Use Distributed Arrays to Solve Systems of Linear Equations with Iterative Methods.
See Also
distributed | sparse | mldivide