Using the Kinect for Windows V1 from Image Acquisition Toolbox
This example shows how to obtain the data available from Kinect® for Windows® V1 sensor using Image Acquisition Toolbox™:
Utility Functions
In order the keep this example as simple as possible, some utility functions for working with the Kinect for Windows metadata have been created. These utility functions include the skeletalViewer function which accepts the skeleton data, color image and number of skeletons as inputs and displays the skeleton overlaid on the color image
See What Kinect for Windows Devices and Formats are Available
The Kinect for Windows has two sensors, an color sensor and a depth sensor. To enable independent acquisition from each of these devices, they are treated as two independent devices in the Image Acquisition Toolbox. This means that separate VIDEOINPUT object needs to be created for each of the color and depth(IR) devices.
% The Kinect for Windows Sensor shows up as two separate devices in IMAQHWINFO. hwInfo = imaqhwinfo('kinect')
hwInfo =
AdaptorDllName: [1x68 char]
AdaptorDllVersion: '4.5 (R2013a Prerelease)'
AdaptorName: 'kinect'
DeviceIDs: {[1] [2]}
DeviceInfo: [1x2 struct]
hwInfo.DeviceInfo(1)
ans =
DefaultFormat: 'RGB_640x480'
DeviceFileSupported: 0
DeviceName: 'Kinect Color Sensor'
DeviceID: 1
VideoInputConstructor: 'videoinput('kinect', 1)'
VideoDeviceConstructor: 'imaq.VideoDevice('kinect', 1)'
SupportedFormats: {1x7 cell}
hwInfo.DeviceInfo(2)
ans =
DefaultFormat: 'Depth_640x480'
DeviceFileSupported: 0
DeviceName: 'Kinect Depth Sensor'
DeviceID: 2
VideoInputConstructor: 'videoinput('kinect', 2)'
VideoDeviceConstructor: 'imaq.VideoDevice('kinect', 2)'
SupportedFormats: {'Depth_320x240' 'Depth_640x480' 'Depth_80x60'}
Acquire Color and Depth Data
In order to acquire synchronized color and depth data, we must use manual triggering instead of immediate triggering. The default immediate triggering suffers from a lag between streams while performing synchronized acquisition. This is due to the overhead in starting of streams sequentially.
% Create the VIDEOINPUT objects for the two streams colorVid = videoinput('kinect',1)
Summary of Video Input Object Using 'Kinect Color Sensor'.
Acquisition Source(s): Color Source is available.
Acquisition Parameters: 'Color Source' is the current selected source.
10 frames per trigger using the selected source.
'RGB_640x480' video data to be logged upon START.
Grabbing first of every 1 frame(s).
Log data to 'memory' on trigger.
Trigger Parameters: 1 'immediate' trigger(s) on START.
Status: Waiting for START.
0 frames acquired since starting.
0 frames available for GETDATA.
depthVid = videoinput('kinect',2)
Summary of Video Input Object Using 'Kinect Depth Sensor'.
Acquisition Source(s): Depth Source is available.
Acquisition Parameters: 'Depth Source' is the current selected source.
10 frames per trigger using the selected source.
'Depth_640x480' video data to be logged upon START.
Grabbing first of every 1 frame(s).
Log data to 'memory' on trigger.
Trigger Parameters: 1 'immediate' trigger(s) on START.
Status: Waiting for START.
0 frames acquired since starting.
0 frames available for GETDATA.
% Set the triggering mode to 'manual' triggerconfig([colorVid depthVid],'manual');
Set the FramesPerTrigger property of the VIDEOINPUT objects to '100' to acquire 100 frames per trigger. In this example 100 frames are acquired to give the Kinect for Windows sensor sufficient time to start tracking a skeleton.
colorVid.FramesPerTrigger = 100; depthVid.FramesPerTrigger = 100;
% Start the color and depth device. This begins acquisition, but does not % start logging of acquired data. start([colorVid depthVid]);
% Trigger the devices to start logging of data.
trigger([colorVid depthVid]);
% Retrieve the acquired data
[colorFrameData,colorTimeData,colorMetaData] = getdata(colorVid);
[depthFrameData,depthTimeData,depthMetaData] = getdata(depthVid);
% Stop the devices
stop([colorVid depthVid]);
Configure Skeletal Tracking
The Kinect for Windows sensor provides different modes to track skeletons. These modes can be accessed and configured from the VIDEOSOURCE object of the depth device. Let's see how to enable skeleton tracking.
% Get the VIDEOSOURCE object from the depth device's VIDEOINPUT object.
depthSrc = getselectedsource(depthVid)
Display Summary for Video Source Object:
General Settings:
Parent = [1x1 videoinput]
Selected = on
SourceName = Depth Source
Tag =
Type = videosource
Device Specific Properties:
Accelerometer = [-0.008547 -0.98046 -0.11966]
BodyPosture = Standing
CameraElevationAngle = 9
DepthMode = Default
FrameRate = 30
IREmitter = on
SkeletonsToTrack = [1x0 double]
TrackingMode = Off
The properties on the depth source object that control the skeletal tracking features are TrackingMode, SkeletonToTrack and BodyPosture properties on the VIDEOSOURCE.
TrackingMode controls whether or not skeletal tracking is enabled and, if it is enabled, whether all joints are tracked, ‘Skeleton’, or if just the hip position is tracked, ‘Position’. Setting TrackingMode to ‘off’ (default) disables all tracking and reduces the CPU load.
The ‘BodyPosture’ property determines how many joints are tracked. If ‘BodyPosture’ is set to ‘Standing’, twenty joints are tracked. If it is set to ‘Seated’, then ten joints are tracked.
The SkeletonToTrack property can be used to selectively track one or two skeletons using the 'SkeletonTrackingID'. The currently valid values for 'SkeletonTrackingID' are returned as a part of the metadata of the depth device.
% Turn on skeletal tracking. depthSrc.TrackingMode = 'Skeleton';
Access Skeletal Data
The skeleton data that the Kinect for Windows produces is accessible from the depth device as a part of the metadata returned by GETDATA. The Kinect for Windows can track the position of up to six people in view and can actively track the joint locations of two of the six skeletons. It also supports two modes of tracking people based on whether they are standing or seated. In standing mode, the full 20 joint locations are tracked and returned; in seated mode the 10 upper body joints are returned. For more details on skeletal data, see the MATLAB documentation on Kinect for Windows adaptor.
% Acquire 100 frames with tracking turned on. % Remember to have a person in person in front of the % Kinect for Windows to see valid tracking data. colorVid.FramesPerTrigger = 100; depthVid.FramesPerTrigger = 100;
start([colorVid depthVid]); trigger([colorVid depthVid]);
% Retrieve the frames and check if any Skeletons are tracked
[frameDataColor] = getdata(colorVid);
[frameDataDepth, timeDataDepth, metaDataDepth] = getdata(depthVid);
% View skeletal data from depth metadata
metaDataDepth
metaDataDepth =
100x1 struct array with fields:
AbsTime
FrameNumber
IsPositionTracked
IsSkeletonTracked
JointDepthIndices
JointImageIndices
JointTrackingState
JointWorldCoordinates
PositionDepthIndices
PositionImageIndices
PositionWorldCoordinates
RelativeFrame
SegmentationData
SkeletonTrackingID
TriggerIndex
We randomly choose the 95th frame to visualize the image and skeleton data.
% Check for tracked skeletons from depth metadata
anyPositionsTracked = any(metaDataDepth(95).IsPositionTracked ~= 0)
anySkeletonsTracked = any(metaDataDepth(95).IsSkeletonTracked ~= 0)
anyPositionsTracked =
1
anySkeletonsTracked =
1
The results above show that at least one skeleton is being tracked. If tracking is enabled but no IDs are specified with the TrackingID property, the Kinect for Windows software automatically chooses up to two skeletons to track. Use the IsSkeletonTracked metadata to determine which skeletons are being tracked.
% See which skeletons were tracked.
trackedSkeletons = find(metaDataDepth(95).IsSkeletonTracked)
trackedSkeletons =
1
Display skeleton's joint coordinates. Note that if the 'BodyPosture' property is set to 'Seated', the 'JointCoordinates' and 'JointIndices' will still have a length of 20, but indices 2-11(upper-body joints) alone will be populated.
jointCoordinates = metaDataDepth(95).JointWorldCoordinates(:, :, trackedSkeletons)
% Skeleton's joint indices with respect to the color image
jointIndices = metaDataDepth(95).JointImageIndices(:, :, trackedSkeletons)
jointCoordinates =
-0.0119 -0.0072 1.9716
-0.0107 0.0545 2.0376
-0.0051 0.4413 2.0680
0.0033 0.6430 2.0740
-0.1886 0.3048 2.0469
-0.3130 0.0472 2.0188
-0.3816 -0.1768 1.9277
-0.3855 -0.2448 1.8972
0.1724 0.3022 2.0449
0.3102 0.0382 2.0304
0.3740 -0.1929 1.9591
0.3786 -0.2625 1.9356
-0.0942 -0.0850 1.9540
-0.1367 -0.4957 1.9361
-0.1356 -0.8765 1.9339
-0.1359 -0.9284 1.8341
0.0683 -0.0871 1.9504
0.0706 -0.4822 1.9293
0.0858 -0.8804 1.9264
0.0885 -0.9321 1.8266
jointIndices =
318 256
317 240
318 143
319 92
271 177
239 243
219 303
216 323
363 177
399 243
421 303
424 322
296 277
286 387
288 492
286 520
340 277
342 384
347 493
350 522
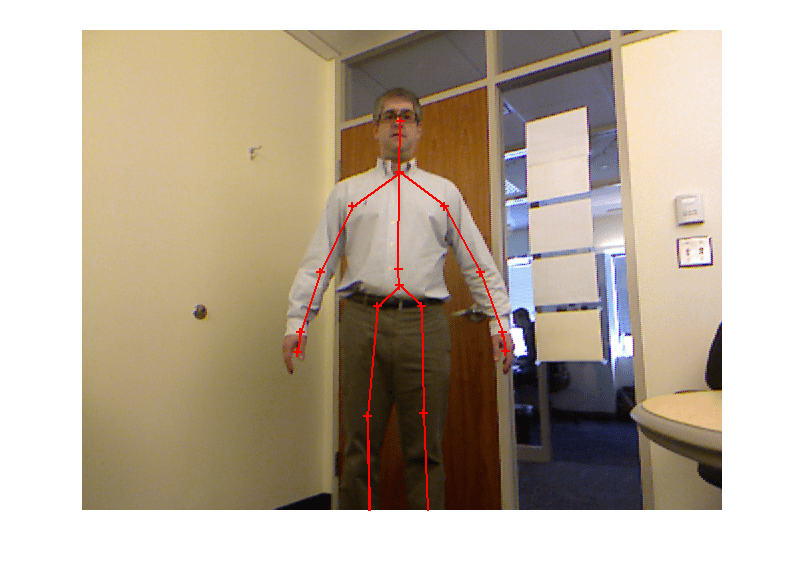
Draw the Skeleton Over the Corresponding Color Image
% Pull out the 95th color frame image = frameDataColor(:, :, :, 95); % Find number of Skeletons tracked nSkeleton = length(trackedSkeletons); % Plot the skeleton util_skeletonViewer(jointIndices, image, nSkeleton);