Pilot-Operated Check Valve
(To be removed) Hydraulic check valve that allows flow in one direction, but can be disabled by pilot pressure
The Hydraulics (Isothermal) library will be removed in a future release. Use the Isothermal Liquid library instead.
For more information on updating your models, see Upgrading Hydraulic Models to Use Isothermal Liquid Blocks.

Libraries:
Simscape /
Fluids /
Hydraulics (Isothermal) /
Valves /
Directional Valves
Description
The Pilot-Operated Check Valve block represents a hydraulic pilot-operated check valve as a data-sheet-based model. The purpose of the check valve is to permit flow in one direction and block it in the opposite direction, as shown in the following figure.
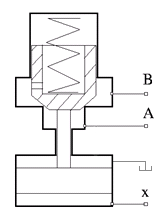
Unlike a conventional check valve, the pilot-operated check valve can be opened by inlet
pressure pA, pilot pressure
pX, or both. The force acting on the
poppet is based on the expression
where
| pA, pB | Gauge pressures at the valve terminals |
| pX | Pressure—gauge or differential—at the pilot terminal |
| AA | Area of the spool in the A chamber |
| AB | Area of the spool in the B chamber |
| AX | Area of the pilot chamber |
The force equation is commonly expressed in the slightly modified form
where kp = AX / AA is usually referred to as pilot ratio and pe is the effective pressure differential across the control member. The valve remains closed while this pressure differential across the valve is lower than the valve cracking pressure. When cracking pressure is reached, the valve control member is forced off its seat, thus creating a passage between the inlet and outlet. If the flow rate is high enough and pressure continues to rise, the area is further increased until the control member reaches its maximum. At this moment, the valve passage area is at its maximum. The valve maximum area and the cracking and maximum pressures are generally provided in the catalogs and are the three key parameters of the block.
The pilot pressure can be a differential value relative to the inlet (port A) or a gauge value (relative to the environment). You can select an appropriate setting—Pressure differential (pX - pA) or Pressure at port X—using the Pressure control specification dropdown list. If Pressure at port X is selected:
where the subscript Atm denotes atmospheric pressure.
The subscript X,Abs denotes the absolute value at the pilot port. If
Pressure differential (pX - pA) is selected:
where the subscript A,Abs similarly denotes the absolute
value at the inlet of the valve (port A). The pilot pressure differential
is constrained to be greater than or equal to zero—if its calculated value should be negative,
zero is assumed in the control pressure calculation.
In addition to the maximum area, the leakage area is also required to characterize the valve. The main purpose of the parameter is not to account for possible leakage, even though this is also important, but to maintain numerical integrity of the circuit by preventing a portion of the system from getting isolated after the valve is completely closed. An isolated or “hanging” part of the system could affect computational efficiency and even cause failure of computation. Therefore, the parameter value must be greater than zero.
By default, the block does not include valve opening dynamics, and the valve sets its opening area directly as a function of pressure:
Adding valve opening dynamics provides continuous behavior that is more physically realistic, and is particularly helpful in situations with rapid valve opening and closing. The pressure-dependent orifice passage area A(p) in the block equations then becomes the steady-state area, and the instantaneous orifice passage area in the flow equation is determined as follows:
In either case, the flow rate through the valve is determined according to the following equations:
where
| q | Flow rate through the valve |
| p | Pressure differential across the valve |
| pe | Equivalent pressure differential across the control member |
pA,pB | Gauge pressures at the valve terminals |
| pX | Gauge pressure at the pilot terminal |
| kp | Pilot ratio, kp = AX / AA |
| k | Valve gain coefficient |
| CD | Flow discharge coefficient |
| A | Instantaneous orifice passage area |
| A(p) | Pressure-dependent orifice passage area |
| Ainit | Initial open area of the valve |
Amax | Fully open valve passage area |
Aleak | Closed valve leakage area |
| pcrack | Valve cracking pressure |
| pmax | Pressure needed to fully open the valve |
| pcr | Minimum pressure for turbulent flow |
| Recr | Critical Reynolds number |
| DH | Instantaneous orifice hydraulic diameter |
| ρ | Fluid density |
| ν | Fluid kinematic viscosity |
| τ | Time constant for the first order response of the valve opening |
| t | Time |
The block positive direction is from port A to port B. This means that the flow rate is positive if it flows from A to B, and the pressure differential is determined as .
Assumptions and Limitations
Valve opening is linearly proportional to the effective pressure differential.
No loading on the valve, such as inertia, friction, spring, and so on, is considered.
No flow consumption is associated with the pilot chamber.