initialplot
Plot initial condition response with additional plot customization options
Syntax
Description
initialplot lets you plot initial condition responses with a
broader range of plot customization options than initial. You can use
initialplot to obtain the plot handle and use it to customize the plot,
such as modify the axes labels, limits and units. You can also use
initialplot to plot initial condition response on an existing set of axes
represented by an axes handle. To customize an existing plot using the plot
handle:
Obtain the plot handle
Use
getoptionsto obtain the option setUpdate the plot using
setoptionsto modify the required options
For more information, see Customizing Response Plots from the Command Line. To create initial condition response plots with
default options or to extract initial condition response data, use initial.
h = initialplot(sys,x0)sys and returns the plot handle h to the plot. You
can use this handle h to customize the plot with the getoptions and setoptions commands.
h = initialplot(___,tFinal)t = 0 to the final time
t = tFinal. Specify tFinal in the system time
units, specified in the TimeUnit property of sys.
For discrete-time systems with unspecified sample time (Ts = -1),
initialplot interprets tFinal as the number of
sampling intervals to simulate.
h = initialplot(___,plotoptions)plotoptions. You can use these options to customize the plot
appearance using the command line. Settings you specify in plotoptions
overrides the preference settings in the MATLAB® session in which you run initialplot. Therefore, this
syntax is useful when you want to write a script to generate multiple plots that look the
same regardless of the local preferences.
Examples
Customize Initial Conditions Plot Using Plot Handle
For this example, use the plot handle to change the time units to minutes and turn on the grid.
Generate a random state-space model with 5 states and create the initial condition response plot with plot handle h.
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
h = initialplot(sys,x0);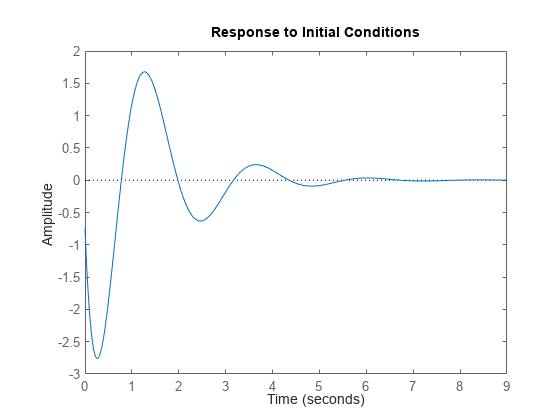
Change the time units to minutes and turn on the grid. To do so, edit properties of the plot handle, h using setoptions.
setoptions(h,'TimeUnits','minutes','Grid','on');
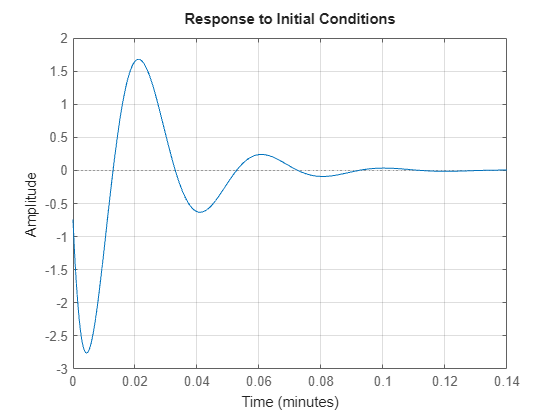
The plot automatically updates when you call setoptions.
Alternatively, you can also use the timeoptions command to specify the required plot options. First, create an options set based on the toolbox preferences.
plotoptions = timeoptions('cstprefs');Change properties of the options set by setting the time units to minutes and enabling the grid.
plotoptions.TimeUnits = 'minutes'; plotoptions.Grid = 'on'; h = initialplot(sys,x0,plotoptions);

You can use the same option set to create multiple initial condition plots with the same customization. Depending on your own toolbox preferences, the plot you obtain might look different from this plot. Only the properties that you set explicitly, in this example TimeUnits and Grid, override the toolbox preferences.
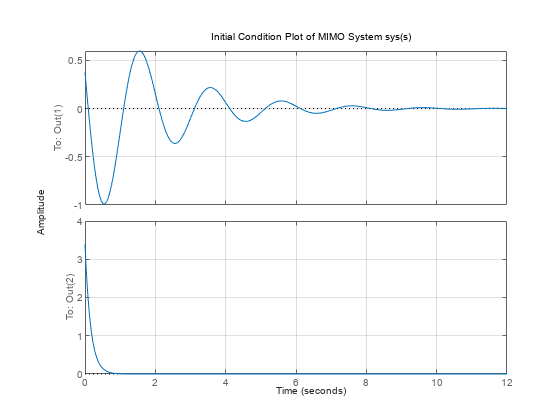
Custom Initial Condition Plot of MIMO System
Consider the following two-input, two-output dynamic system.
Convert the sys to state-space form since initial condition plots are supported only for state-space models.
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
The resultant state-space model has four states. Hence, provide an initial condition vector with four elements.
x0 = [0.3,0.25,1,4];
Use timeoptions to create a plot options set and turn the grid on. Provide an appropriate title before creating the initial conditions plot.
plotoptions = timeoptions; plotoptions.Grid = 'on'; plotoptions.Title.String = 'Initial Condition Plot of MIMO System sys(s)'; h = initialplot(sys,x0,plotoptions);
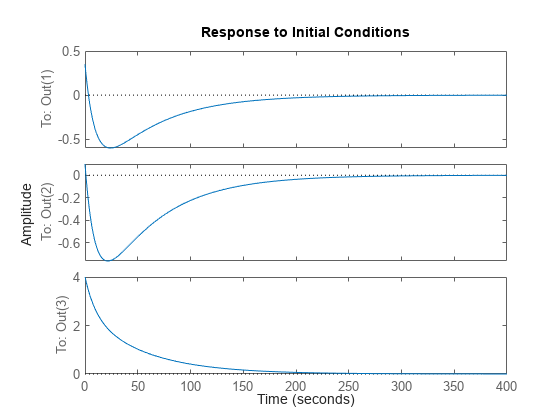
Initial Condition Plot with Specified Grid Color
For this example, consider a MIMO state-space model with 3 inputs, 3 outputs and 3 states. Create an initial condition plot with red colored grid lines.
Create the MIMO state-space model sys_mimo.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys_mimo = ss(A,B,C,D); size(sys_mimo)
State-space model with 3 outputs, 3 inputs, and 3 states.
Create an initial condition plot with plot handle h and use getoptions for a list of the options available.
x0 = [0.35,0.1,4]; h = initialplot(sys_mimo,x0);
p = getoptions(h)
p =
Normalize: 'off'
SettleTimeThreshold: 0.0200
RiseTimeLimits: [0.1000 0.9000]
TimeUnits: 'seconds'
ConfidenceRegionNumberSD: 1
IOGrouping: 'none'
InputLabels: [1x1 struct]
OutputLabels: [1x1 struct]
InputVisible: {0x1 cell}
OutputVisible: {3x1 cell}
Title: [1x1 struct]
XLabel: [1x1 struct]
YLabel: [1x1 struct]
TickLabel: [1x1 struct]
Grid: 'off'
GridColor: [0.1500 0.1500 0.1500]
XLim: {[0 400]}
YLim: {3x1 cell}
XLimMode: {'auto'}
YLimMode: {3x1 cell}
Use setoptions to update the plot with the required customization.
setoptions(h,'Grid','on','GridColor',[1 0 0]);
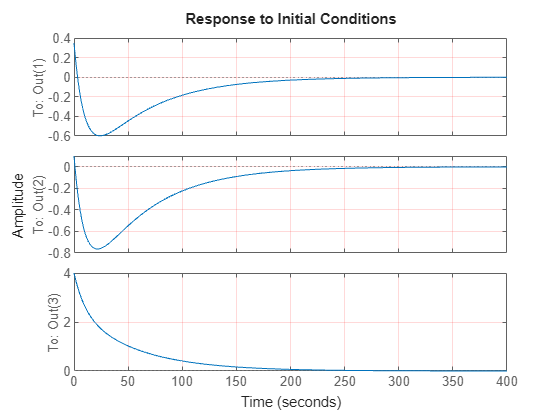
The plot automatically updates when you call setoptions. For MIMO models, initialplot produces a grid of plots, each plot displaying the initial condition response of one I/O pair.
Customized Initial Conditions Response Plot at Specified Time
For this example, examine the initial condition response of the following zero-pole-gain model and limit the plot to tFinal = 15 s. Use 15-point blue text for the title. This plot should look the same, regardless of the preferences of the MATLAB session in which it is generated.
First, convert the zpk model to an ss model since initialplot only supports state-space models.
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
Then, create a default options set using timeoptions.
plotoptions = timeoptions;
Next change the required properties of the options set plotoptions.
plotoptions.Title.FontSize = 15; plotoptions.Title.Color = [0 0 1];
Now, create the initial conditions response plot using the options set plotoptions.
h = initialplot(sys,x0,tFinal,plotoptions);
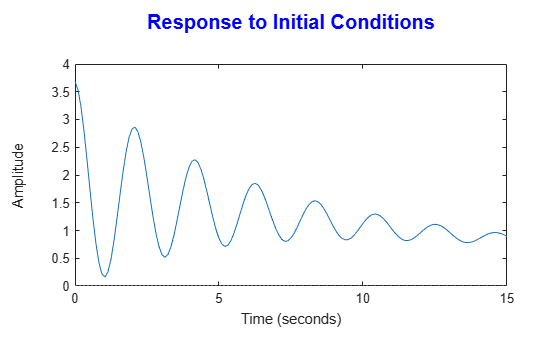
Because plotoptions begins with a fixed set of options, the plot result is independent of the toolbox preferences of the MATLAB session.
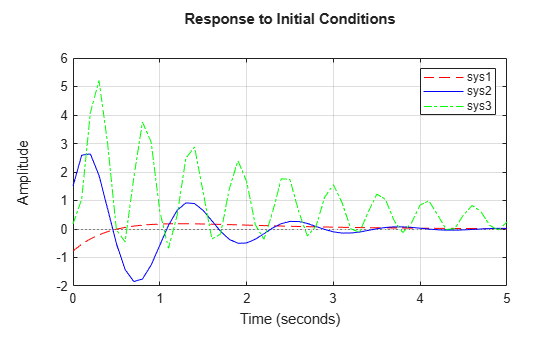
Plot Initial Condition Responses of Multiple Systems
For this example, plot the initial condition responses of three dynamic systems and use the plot handle to enable the grid.
First, create the three models and provide the initial conditions.
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];Plot the initial condition responses of the three models.
t = 0:0.1:5; h = initialplot(sys1,'r--',sys2,'b',sys3,'g-.',x0,t); legend('sys1','sys2','sys3')
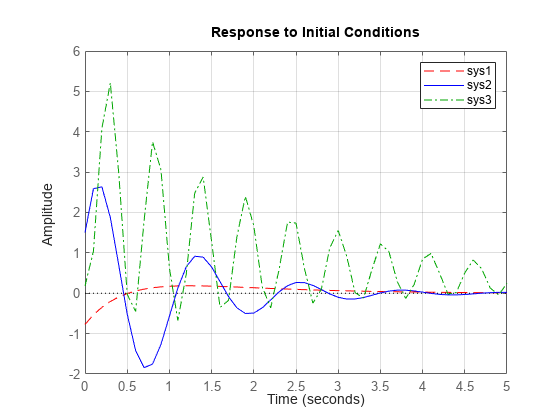
Use the plot handle to enable the grid.
setoptions(h,'Grid','on');
Input Arguments
Output Arguments
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)