d2c
Convert model from discrete to continuous time
Description
sysc = d2c(sysd)sysd to a continuous-time model using zero-order hold on the
inputs.
Examples
Convert Discrete-Time Transfer Function to Continuous Time
Create the following discrete-time transfer function:
H = tf([1 -1],[1 1 0.3],0.1);
The sample time of the model is .
Derive a continuous-time, zero-order-hold equivalent model.
Hc = d2c(H)
Hc = 121.7 s + 3.668e-12 --------------------- s^2 + 12.04 s + 776.7 Continuous-time transfer function.
Discretize the resulting model, Hc, with the default zero-order hold method and sample time 0.1s to return the original discrete model, H.
c2d(Hc,0.1)
ans =
z - 1
-------------
z^2 + z + 0.3
Sample time: 0.1 seconds
Discrete-time transfer function.
Use the Tustin approximation method to convert H to a continuous time model.
Hc2 = d2c(H,'tustin');Discretize the resulting model, Hc2, to get back the original discrete-time model, H.
c2d(Hc2,0.1,'tustin');Convert Identified Discrete-Time Transfer Function to Continuous Time
Estimate a discrete-time transfer function model, and convert it to a continuous-time model.
load iddata1 sys1d = tfest(z1,2,'Ts',0.1); sys1c = d2c(sys1d,'zoh');
Estimate a continuous-time transfer function model.
sys2c = tfest(z1,2);
Compare the response of sys1c and the directly estimated continuous-time model, sys2c.
compare(z1,sys1c,sys2c)
![]()
The two systems are almost identical.
Regenerate Covariance Information After Converting to Continuous-Time Model
Convert an identified discrete-time transfer function model to continuous-time.
load iddata1 sysd = tfest(z1,2,'Ts',0.1); sysc = d2c(sysd,'zoh');
sys1c has no covariance information. The d2c operation leads to loss of covariance data of identified models.
Regenerate the covariance information using a zero iteration update with the same estimation command and estimation data.
opt = tfestOptions; opt.SearchOptions.MaxIterations = 0; sys1c = tfest(z1,sysc,opt);
Analyze the effect on frequency-response uncertainty.
h = bodeplot(sysd,sys1c); showConfidence(h,3)
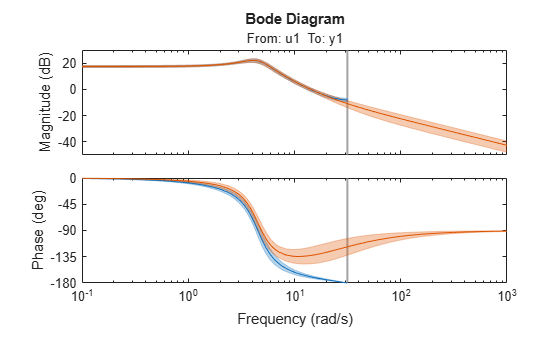
The uncertainties of sys1c and sysd are comparable up to the Nyquist frequency. However, sys1c exhibits large uncertainty in the frequency range for which the estimation data does not provide any information.
If you do not have access to the estimation data, use the translatecov command which is a Gauss-approximation formula based translation of covariance across model type conversion operations.
Input Arguments
Output Arguments
References
[1] Franklin, G.F., Powell,D.J., and Workman, M.L., Digital Control of Dynamic Systems (3rd Edition), Prentice Hall, 1997.
[2] Kollár, I., G.F. Franklin, and R. Pintelon, "On the Equivalence of z-domain and s-domain Models in System Identification," Proceedings of the IEEE® Instrumentation and Measurement Technology Conference, Brussels, Belgium, June, 1996, Vol. 1, pp. 14-19.
Version History
Introduced before R2006a
See Also
d2cOptions | c2d | translatecov (System Identification Toolbox) | logm | Convert Model Rate
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)