conncomp
Connected graph components
Description
bins = conncomp(G)G as bins. The bin numbers indicate which component each
node in the graph belongs to.
If
Gis an undirected graph, then two nodes belong to the same component if there is a path connecting them.If
Gis a directed graph, then two nodes belong to the same strong component only if there is a path connecting them in both directions.
bins = conncomp(G,Name,Value)conncomp(G,'OutputForm','cell') returns a cell array to
describe the connected components.
Examples
Find Graph Components
Create and plot an undirected graph with three connected components. Use conncomp to determine which component each node belongs to.
G = graph([1 1 4],[2 3 5],[1 1 1],6); plot(G)
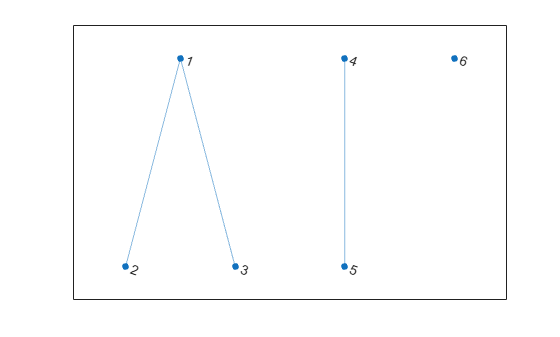
bins = conncomp(G)
bins = 1×6
1 1 1 2 2 3
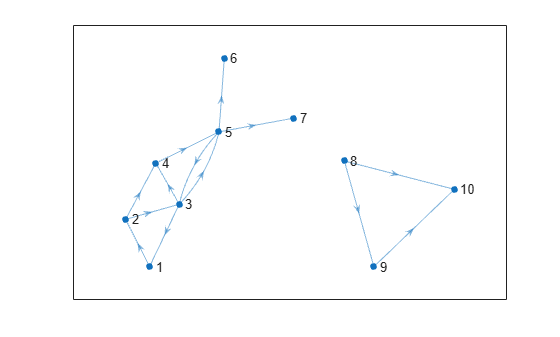
Strong and Weak Graph Components
Create and plot a directed graph, and then compute the strongly connected components and weakly connected components. Weakly connected components ignore the direction of connecting edges.
s = [1 2 2 3 3 3 4 5 5 5 8 8]; t = [2 3 4 1 4 5 5 3 6 7 9 10]; G = digraph(s,t); plot(G,'Layout','layered')
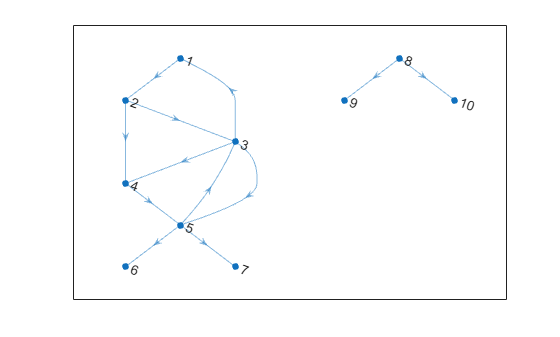
str_bins = conncomp(G)
str_bins = 1×10
4 4 4 4 4 6 5 1 3 2
weak_bins = conncomp(G,'Type','weak')
weak_bins = 1×10
1 1 1 1 1 1 1 2 2 2
Discard Graph Components Based on Size
Use the second output of conncomp to extract the largest component of a graph or to remove components below a certain size.
Create and plot a directed graph. The graph has one large component, one small component, and several components that contain only a single node.
s = [1 2 2 3 3 3 4 5 5 5 8 8 9]; t = [2 3 4 1 4 5 5 3 6 7 9 10 10]; G = digraph(s,t,[],20); plot(G,'Layout','layered')
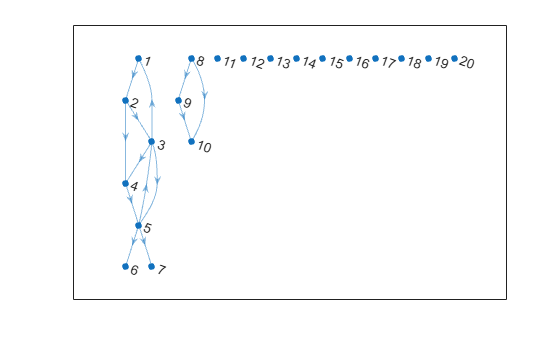
Calculate the weakly connected components and specify two outputs to conncomp to get the size of each component.
[bin,binsize] = conncomp(G,'Type','weak')
bin = 1×20
1 1 1 1 1 1 1 2 2 2 3 4 5 6 7 8 9 10 11 12
binsize = 1×12
7 3 1 1 1 1 1 1 1 1 1 1
Use binsize to extract the largest component from the graph. idx is a logical index indicating whether each node belongs to the largest component. The subgraph function extracts the nodes selected by idx from G.
idx = binsize(bin) == max(binsize); SG = subgraph(G, idx); plot(SG)
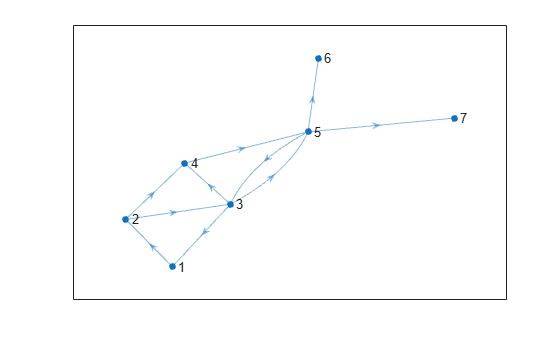
A similar use of binsizes is to filter out components based on size. The procedure is similar to extracting the largest component, however in this case each node can belong to any component that meets the size requirement.
Filter out any components in G that have fewer than 3 nodes. idx is a logical index indicating whether each node belongs to a component with 3 or more nodes.
idx = binsize(bin) >= 3; SG = subgraph(G, idx); plot(SG)
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2015b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)