Simulink Coder (ehemals Real-Time Workshop) generiert und führt C und C++ Code aus Simulink-Modellen, Stateflow-Diagrammen und MATLAB-Funktionen aus. Der generierte Quellcode kann für Echtzeit- und Nicht-Echtzeit-Anwendungen verwendet werden, einschließlich Simulationsbeschleunigung, Rapid Prototyping und Hardware-in-the-Loop-Tests. Sie können den generierten Code mit Simulink abstimmen und überwachen oder den Code außerhalb von MATLAB und Simulink ausführen und mit ihm interagieren.
Wenn Sie Ihre Simulink-Simulationen als Standalone Executables, Web-Anwendungen oder Functional Mockup Units (FMUs) freigeben möchten, verwenden Sie den Simulink Compiler.
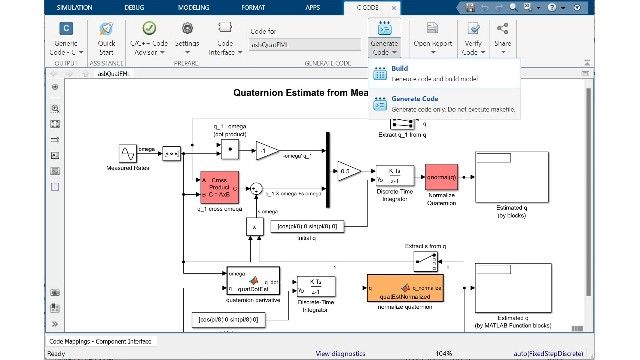
Generieren von Code und Executables aus Simulink
Generieren Sie C, C++, gemeinsame Bibliotheken und ausführbare Dateien aus Simulink, Stateflow und vielen Add-on-Produkten wie Simscape und der Deep Learning Toolbox.

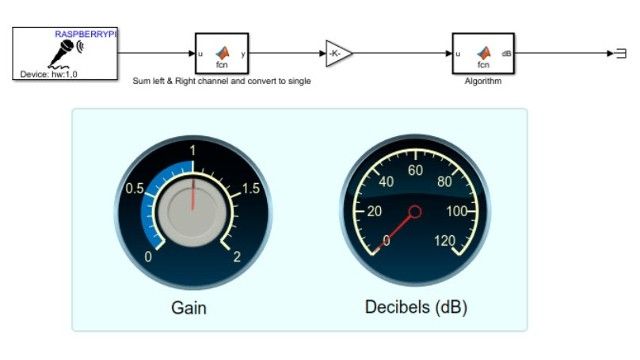
Prototypen und Tests mit Hardware
Führen Sie aus Simulink generierten Code für die Desktop-Ausführung, das Rapid Prototyping und Tests von eingebetteten Reglern und autonomen Systemen aus.
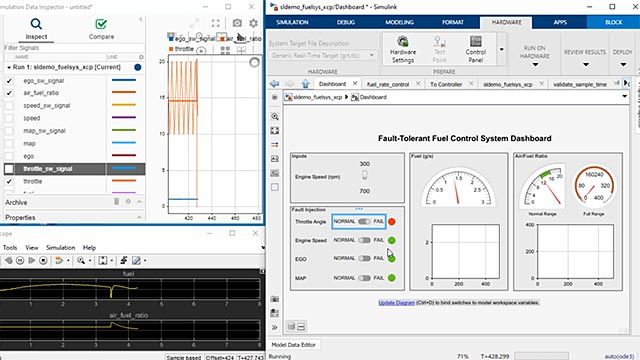
Optimieren von Parametern und Protokollieren von Daten in Echtzeit
Optimieren Sie Ihre Entwicklung in Simulink, während der Code auf externen Geräten ausgeführt wird, indem Sie Daten mithilfe von Scopes, Dashboards und Live-Stream-Plots anzeigen und optimieren.
Produktressourcen:
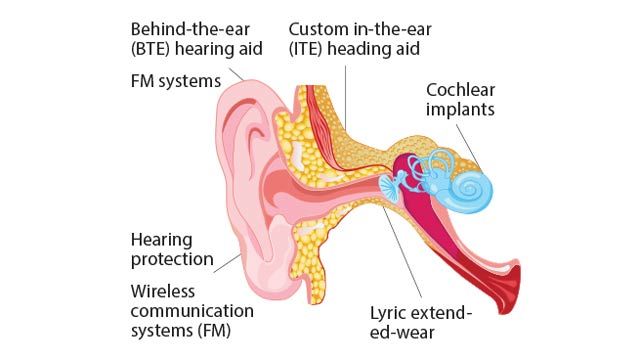
„Wir können unsere Entwicklungen in Simulink iterieren, den Code mit Simulink Coder neu generieren und mit Simulink Real-Time in wenigen Minuten Echtzeittests durchführen. Ohne Model-Based Design würde jeder Verbesserungsschritt bei Echtzeit-Hardware normalerweise Tage dauern.“
Raoul Glatt, Sonova
Kostenlose Testversion anfordern
30 Tage kostenlos ausprobieren.
Weitere Informationen anfordern
Lassen Sie uns wissen, wie wir Ihnen helfen können.
Haben Sie Fragen?
Nächste Schritte



Sie können auch eine Website aus der folgenden Liste auswählen:
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asien-Pazifik
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)