LTI System
Verwendung zeitinvarianter Systemmodellobjekte in Simulink
Bibliotheken:
Control System Toolbox
Beschreibung
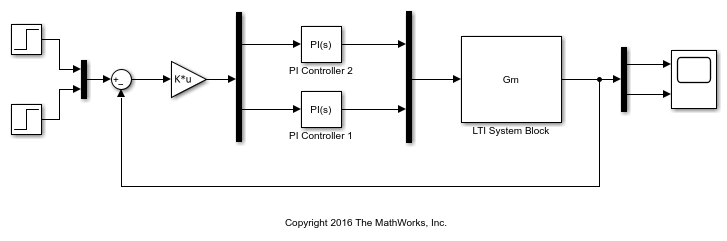
Der Block LTI System importiert lineare Systemmodellobjekte in die Simulink®-Umgebung. Sie legen das zu importierende LTI-Modell im Parameter LTI system variable fest. Sie können jeden Typ echter, linearer, zeitinvarianter dynamischer Systemmodelle importieren. Wenn das importierte System ein Zustandsraummodell (ss) ist, können Sie die Werte für den Anfangszustand im Parameter Initial states angeben.
Ports
Eingänge
Ausgänge
Parameter
Erweiterte Fähigkeiten
Versionsverlauf
Eingeführt vor R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)